














产品中心
专注于运动控制数据采集和
设备物联等技术应用
专注于运动控制数据采集和
设备物联等技术应用

| 项目 | 规格 | 详细描述 |
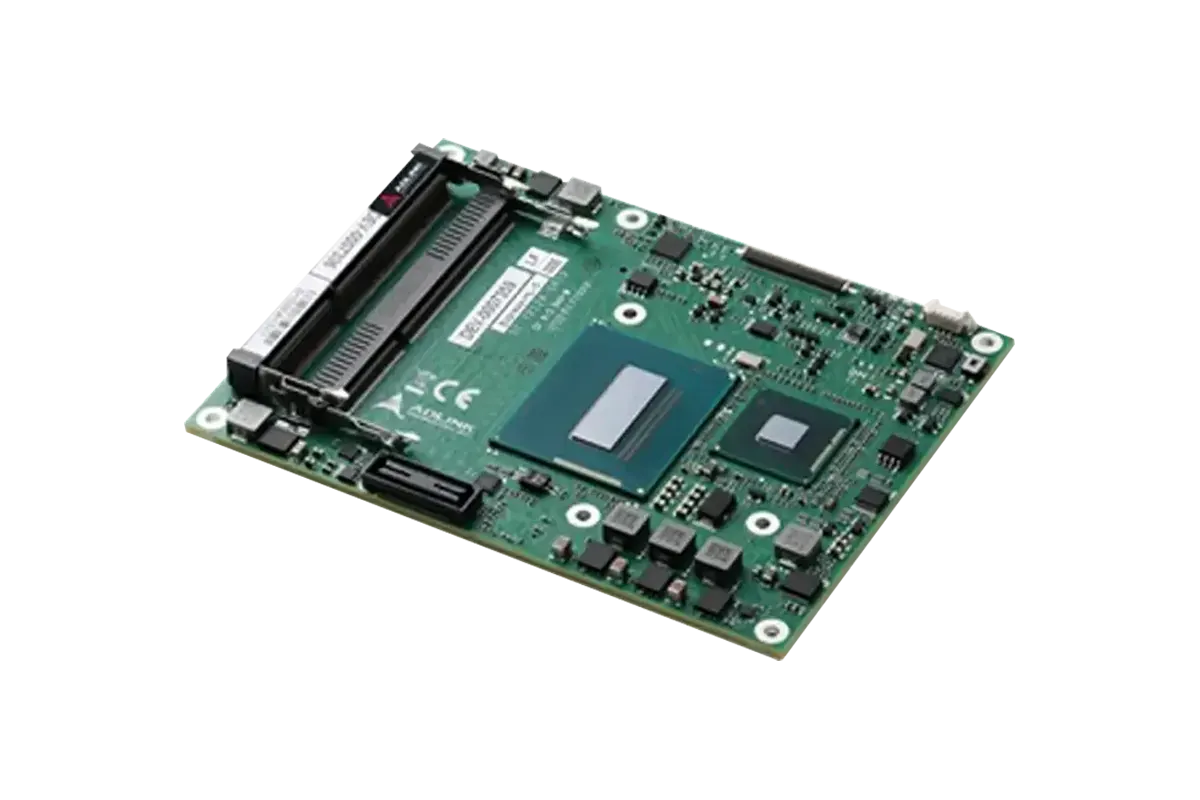
名称 | IMC100R | 多微处理器实时运算平台,具有运动控制功能,支持多种型号工业机器人结构;采用EtherCAT总线实现网络化控制,以及远程和本地IRlink总线的扩展模块逻辑控制。 |
控制轴数 | >16轴 | 支持至少16轴插补运动高端控制器;单台控制器控制多台机器人,并可同时控制多个外部扩展轴。 |
适用机型 | 标准及非标机型 | 支持直角坐标、SCARA,DELTA,四轴码垛、六关节机器人等标准机型,以及各种非标机型。 |
| 运动方式 | PTP方式,CP方式(连续路径控制) 支持空间直线插补,空间圆弧插补 | |
控制功能 | 编程语言自定义:GUI开发环境(易用化,集成化,工艺内嵌) 关节控制:同时控制至少16轴,AC伺服控制器 速度控制:PTP控制时,可在1-100%间编程控制;CP控制时,可以自由指定实际速度控制 加速度控制:PTP控制时,可在1-100%间编程控制;CP控制时,可以自由指定实际速度控制 | |
| PLC功能 | 支持IEC61131-3标准,PLC编程功能,实现对所有I/O资源的灵活编程,对输入口的检测和对输出口的控制以及与系统内核进行数据交换 | |
| 安全功能 | 异常停止开关,有安全门输入而暂时停止,速度偏差过量检测,位置偏差过量检测,存储异常检测,CPU异常检测,带键模式切换,锁定; | |
| 记忆容量 | 程序类:>16Mb 点数据类:最大10000点 | |
| 存储方式 | 外部SD扩展卡 | 8G容量,运行程序备份存储 |
| 示教方法 | 远程示教,手持示教器,CAD-to-Point示教(离线编程) | |
| 伺服接口 | 总线配置EtherCAT主站接口;全双工,100 Mbit/s (100Base-TX) | 32轴联动,扫描周期<500us;实时数量 >20字/轴;支持多通道机器人控制; |
| 电源 | 控制器输入电压:24V;不含驱动装置; | |
| 运行温度 | -10°C~45°C,按照IEC61131-2 | |
| 存储温度 | -20°C~85°C,按照IEC61131-2 | |
| 安全等级 | IEC61131-2 | |
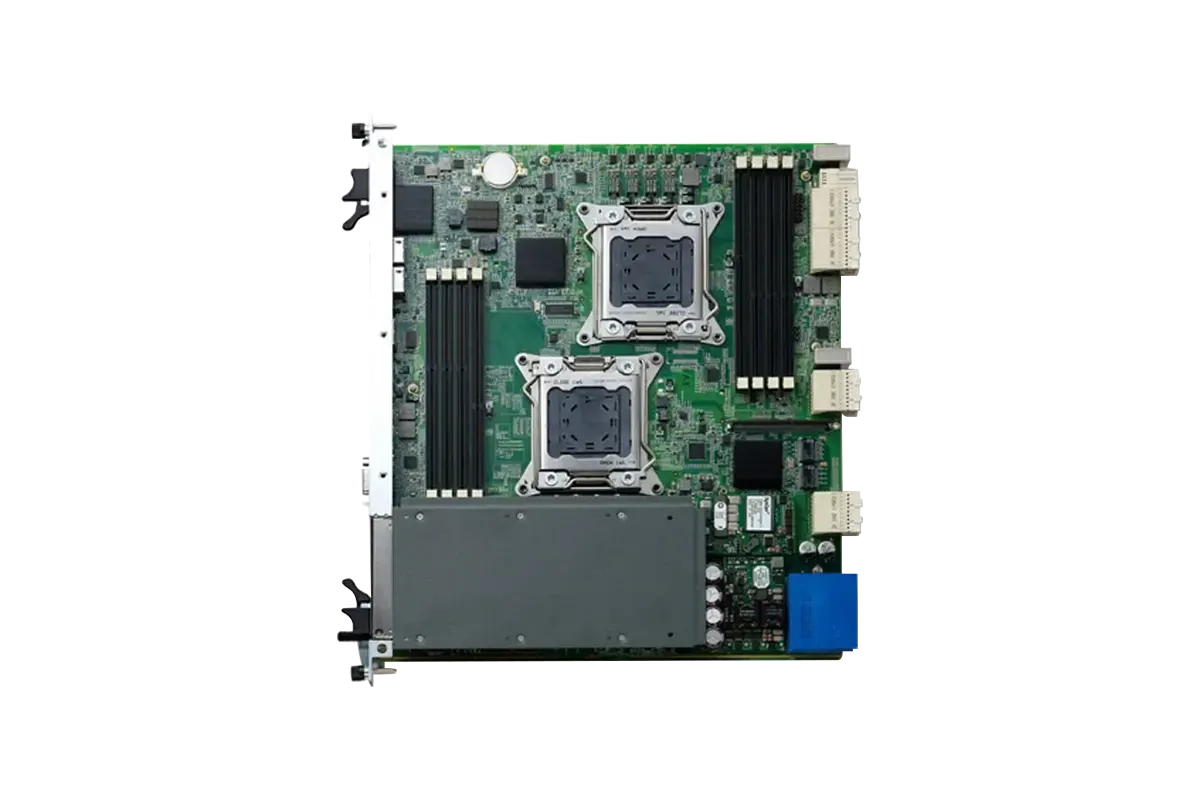
EPS从属系统采用模块化设计,具有灵活的高通道密度,坚固的架构,易于维护且具备智能 管理能力,与第三方的EtherCAT产品完全兼容。精确的时间控制功能可以针对关键应用实现I/O同步, FPGA和ARM技术的使用,可以让用户监测EPS模块和系统的状态,包括工作温度,继电器开关的使用周 期和通用电机驱动控制的运动控制状态。此外,EtherCAT产品的组态自动扫描和配置,更加有 利于配置整个EtherCAT系统。
EPS独特的架构和电子设计,不仅支持热插拔功能,减少维修时间,同时其坚固的结构和-20℃至+60℃ 的宽温工作范围,使得其可以在最恶劣的环境中运行。
作为工业机器人运动控制和现场工艺控制的载体,IMC100控制器在大风科技工业自动化产品族中占据重要而核心的地位。IMC100作为精心打造的一款高性价比的运动控制产品,将和汇川技术的伺服产品、视觉产品一起满足中国工业机器人市场的各种需求。
IMC100系列产品坚持模块化的设计理念,产品兼具机器人运动控制功能和基于PLCopen的逻辑控制功能。具有EtherCAT,PROFIBUS-DP,CANOpen等多种高端与经济型工业现场总线。可通过EtherCAT总线实现多轴伺服指令的实时性传输,支持16轴和32轴运动控制功能,支持SCARA、DELTA。

